Hardware: verschil tussen versies
Naar navigatie springen
Naar zoeken springen


(→Servo) |
(→Servo) |
||
| Regel 19: | Regel 19: | ||
{| border=1 | {| border=1 | ||
| Kleur | | '''Kleur''' | ||
| Naam | | '''Naam''' | ||
| Opmerkingen | | '''Opmerkingen''' | ||
|- | |- | ||
| Bruin of Zwart | | Bruin of Zwart | ||
| Voeding - | | Voeding - | ||
| | | De MIN van de voeding | ||
|- | |- | ||
| Rood | | Rood | ||
| Voeding + | | Voeding + | ||
| (3 tot 6 | | De PLUS van de voeding (3 tot 6 Volt) | ||
|- | |- | ||
| Oranje of Wit | | Oranje of Wit | ||
| Signaal | | Signaal | ||
| Een "HOOG" puls van 0,5 tot 2,8 | | Een "HOOG" puls van 0,5 tot 2,8 milliseconden met een LAAG tijd van 10 tot 30 msec | ||
|} | |} | ||
Versie van 24 jun 2012 14:10
Beginnen | Hardware | Software | Voorbeeldprogramma | Inkscape & lasersnijden | Errors & Tips | Kekbot | [TrompBot Website] | Trompbots | Percussie & ritme | Fioretti programma
Microcontroller
De robot wordt bestuurd door een microcontroller. De microcontroller die gebruikt wordt is een MSP430 (zo heet deze) die gemaakt wordt door Texas Instruments.

Printplaat
De printplaat zorgt voor de aansluiting van de componenten op de microcontroller

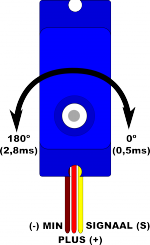
Servo
De servo is een motor die met de microcontroller aangestuurd kan worden.


Hij heeft 3 draadjes:
| Kleur | Naam | Opmerkingen |
| Bruin of Zwart | Voeding - | De MIN van de voeding |
| Rood | Voeding + | De PLUS van de voeding (3 tot 6 Volt) |
| Oranje of Wit | Signaal | Een "HOOG" puls van 0,5 tot 2,8 milliseconden met een LAAG tijd van 10 tot 30 msec |